Go to School Store
Магазина Go to School Store работает с 05.08.2019. его рейтинг составлет 94.72 баллов из 100.
В избранное добавили 987 покупателя.
Средний рейтинг торваров продавца 4.8 в продаже представленно 3869 наименований товаров, успешно доставлено 933 заказов. 265 покупателей оставили отзывы о продавце.
Характеристики
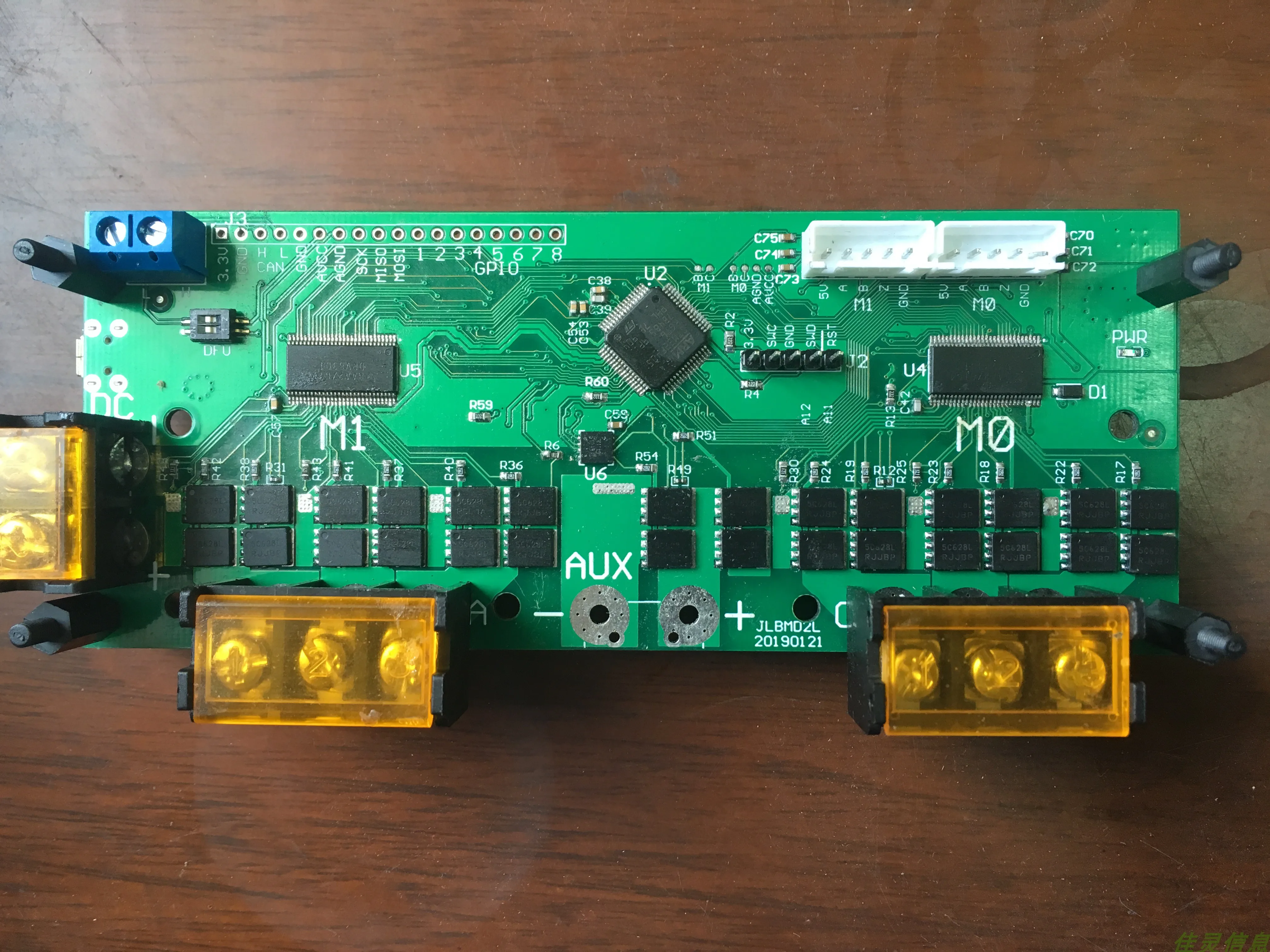
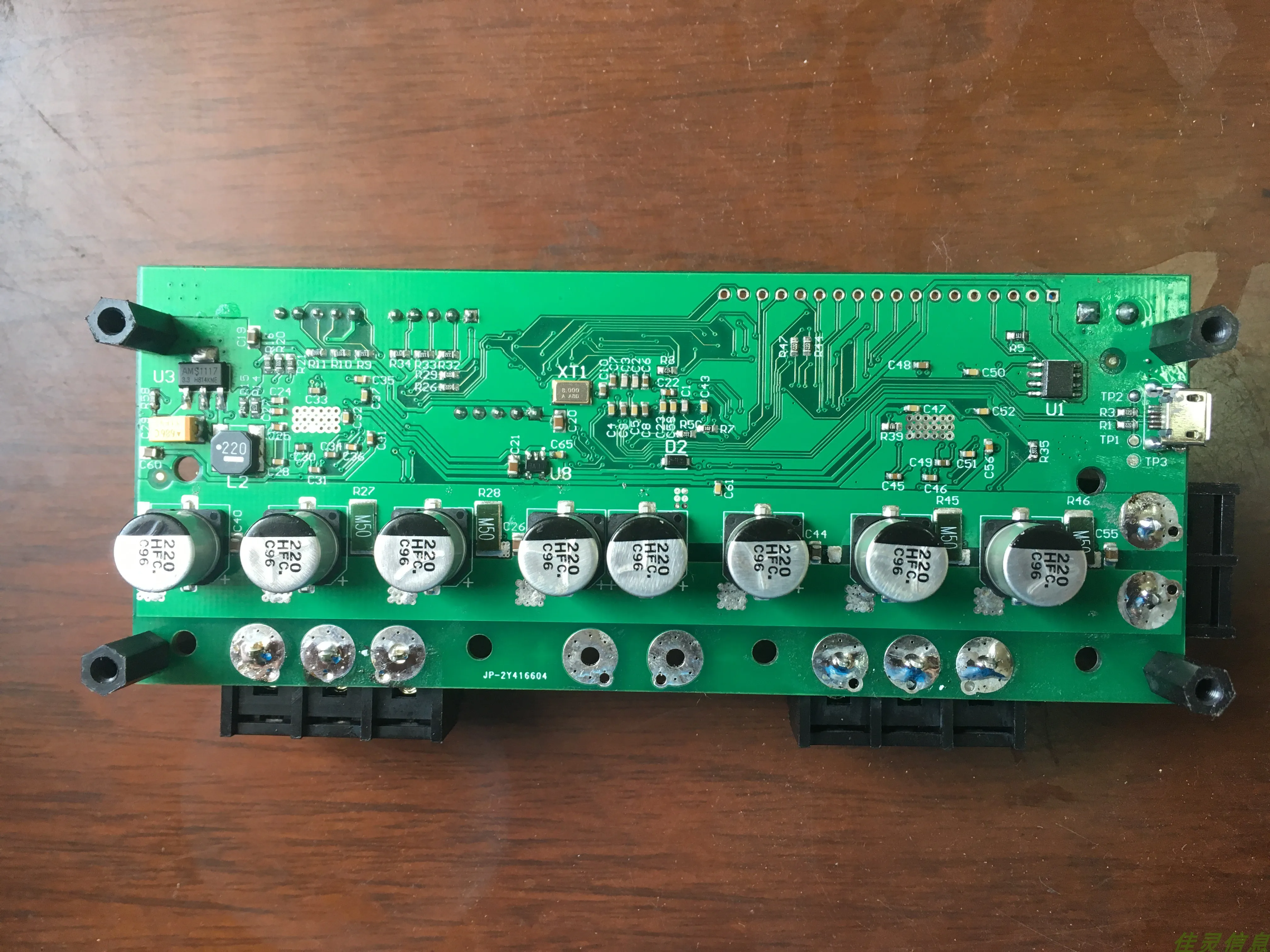
Высокопроизводительный бесщеточный контроллер двигателя ODrive Hardware3.5 с
История изменения цены
*Текущая стоимость 1 981,55 - 7 989,66 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц |
Минимальная цена |
Макс. стоимость |
Цена |
| Aug-17-2025 |
2516.12 руб. |
2566.21 руб. |
2541 руб. |
| Jul-17-2025 |
2040.22 руб. |
2081.50 руб. |
2060.5 руб. |
| Jun-17-2025 |
2476.41 руб. |
2526.57 руб. |
2501 руб. |
| May-17-2025 |
2456.77 руб. |
2505.55 руб. |
2480.5 руб. |
| Apr-17-2025 |
1961.80 руб. |
2000.81 руб. |
1980.5 руб. |
| Mar-17-2025 |
2417.5 руб. |
2465.49 руб. |
2441 руб. |
| Feb-17-2025 |
2397.1 руб. |
2445.26 руб. |
2421 руб. |
| Jan-17-2025 |
2377.87 руб. |
2425.93 руб. |
2401 руб. |
Описание товара

Modname = ckeditor
Тип 1:Odrive3.5-48V
Тип 2: магнитный энкодер AS5047P (с магнитом)
- Трехпетлевое управление: скорость, положение, ток
- На основе модифицированной версии ODrive V3.5
- Прошивка ODrive сожжена и протестирована для хорошей доставки.
Этот проект представляет собой недорогой бесщеточный двигатель с приводом к земле. Цель-использовать недорогие бесщеточные двигатели для высокопроизводительных робототехники.
Начать работу
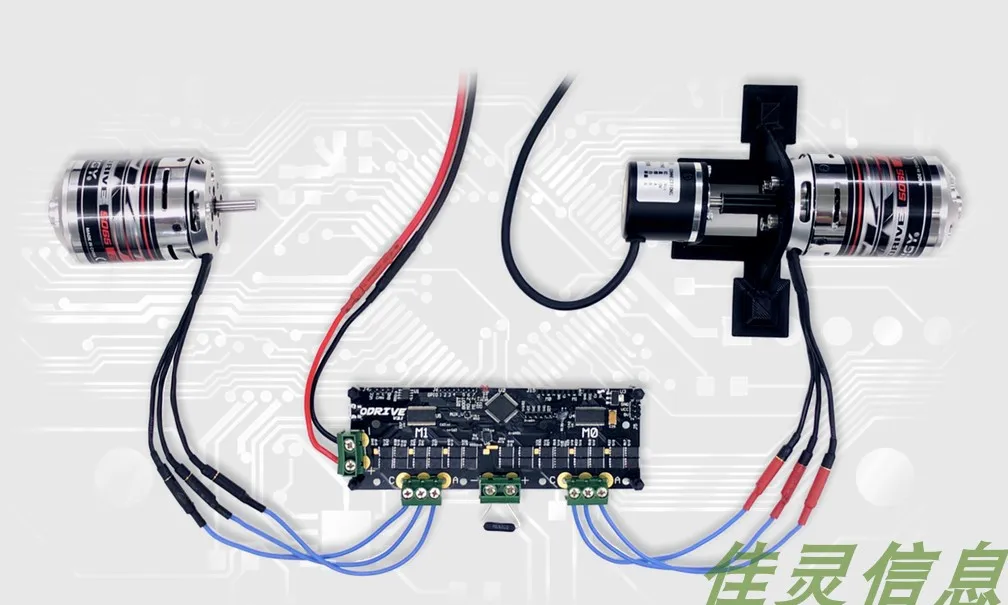
Начните тестирование с помощью одного двигателя и энкодера, совсем никаких проблем, даже рекомендуется. Убедитесь, что есть хорошее механическое соединение между датчиком и двигателем, что может вызвать катастрофические колебания. Все системы ввода-вывода без питания 3,3 В и допуск входа 5 В, за исключением: в ODrive v3.2 и ранее, GPIO 3 и GPIO 4 не поддерживают 5 В. Вам нужны один или два бесщеточных двигателя, четырехдиапазонные инкрементные кодировщики и Силовые резисторы. Значение сопротивления мощности, которое вам нужно, зависит от настроек вашего двигателя и максимальной/средней офсетной мощности. Хорошая начальная точка-резистор 0,47 Ом, 50 Вт. Подключения двигателя до 3-х фазный винтовые клеммы и подключения источника питания резистор к вспомогательному терминал. Подключите источник питания (12-24 В) к клемме постоянного тока, чтобы убедиться в полярности. В настоящее время не применяйте электроэнергию. Подключите энкодер к J4. A, требуется фаза B, Z (указательный импульс) необязательно. Линии A, B и Z имеют выдвижной резистор 3,3 k для выхода энкодера с открытым потоком. Для односторонних push-Тяговых сигналов со слабым током привода (<4 мА), возможно, вам понадобится удалить тяговые резисторы.
В настоящее время Поддерживаются режимы команд: USB, UART и STEP/DIR.
Если вы отправляете команду через USB, вы можете подключить кабель к порту micro-USB. Если вы отправляете команды через UART, см. Настройку UART. Если вы используете STEP/DIR, см. Настройку STEP/DIR.
Теперь вы можете: загрузить и построить прошивку, настроить параметры прошивки, щетка прошивки для запуска программы на плате
Пусковая установка показана здесь.
Примечание: ротор должен вращаться во время запуска без сгибающей нагрузки. Это означает, что масса и слабая трение нагрузки хороши, но тяжесть или пружинная нагрузка не хороши. Также обратите внимание, что в видео Двигатель вращается после инициализации, но в текущем программном обеспечении по умолчанию следует установить положение 0 управления позицией (т. Е. Положение при вводе в эксплуатацию)
Если у вас есть кодировщик с сигналом индекса (Z), вы можете откалибровать один раз и возобновить калибровку при вводе в эксплуатацию. Инструкции по этому поводу.
Отправить команду
Эта запись отправляет команды USB и UART. Вы также можете посмотреть на библиотеку ODrive Arduino, что упрощает использование интерфейса UART на Arduino. Вы также можете воспринимать это как пример реализации как общаться с ODrive через UART.
Установка UART
Скорость передачи бод: 115200 пин назначение:
GPIO 1: Tx (Rx подключен к другим устройствам)
GPIO 2: Rx (Tx подключен к другим устройствам)
GND: необходимо соединить заземляющие провода устройства вместе. Используйте любой GND-контакт на J3 от ODrive.
Чтобы включить режим UART для GPIO, см. Настройки режима GPIO.
Настройка шага/DIR
Штифт:
GPIO 1: шаг M0
GPIO 2: M0 DIR
GPIO 3: M1 STEP
GPIO 4: M1 DIR
GND: необходимо соединить заземляющие провода устройства вместе. Используйте любой GND-контакт на J3 от ODrive.
Обратите внимание, что GPIO_3 и GPIO_4 не допускают 5 в уровней на ODrive v3.2 и ниже, поэтому сигналы 3,3 В! ODrive v3.3 и выше имеет 5 в толерантный пин GPIO.
Чтобы включить режим step / dir в GPIO, см. Настройки режима GPIO.
Также есть Новая переменная конфигурации, называемая counts_per_step, которая определяет количество кодировщиков для «шагового размера». Это может быть любое значение плавающей точки. Скорость шага ждет тестирования, но она должна обрабатывать как минимум 16 кГц. Если вы хотите протестировать его, обратите внимание, что режим неисправности при слишком высокой ступенчатой скорости ожидается, что двигатель выключен и поднимается.
Обратите внимание, что линия сейчас не включена, и интерфейс шага/направления по умолчанию включен, и он остается активным, пока ODrive находится в режиме контроля положения. По умолчанию ODrive начинается в режиме контроля положения, поэтому вам не нужно отправлять команды через USB для начала работы. Вы все еще можете отправлять USB-команды, если хотите.
Смотрите так же другие товары:












