

Новое поступление

Мужские ботильоны в стиле пэчворк FR.LANCELOT осенне-зимние ботинки челси мужские без
6 270,56 руб.

Сексуальные женские кружевные бюстгальтеры на бретельках модные топы Майка без

Trustdavis Оригинальное Стерлинговое Серебро 925 пробы Модные полые круглые CZ кольца
284,75 руб.

Набор строительных блоков сделай сам со светодиодной подсветкой 21044 | Игрушки и
2 145,47 руб.

Винтажная серебряная подвеска в стиле арт-деко 10x10 12x12 мм круглый кабошон
635,39 - 703,54 руб.

Мужские стринги с принтом красные бандаж джоки бикини сексуальное нижнее белье
241,58 - 287,02 руб.

Мужские и женские классические квадратные солнцезащитные очки в ретро-стиле с
Характеристики
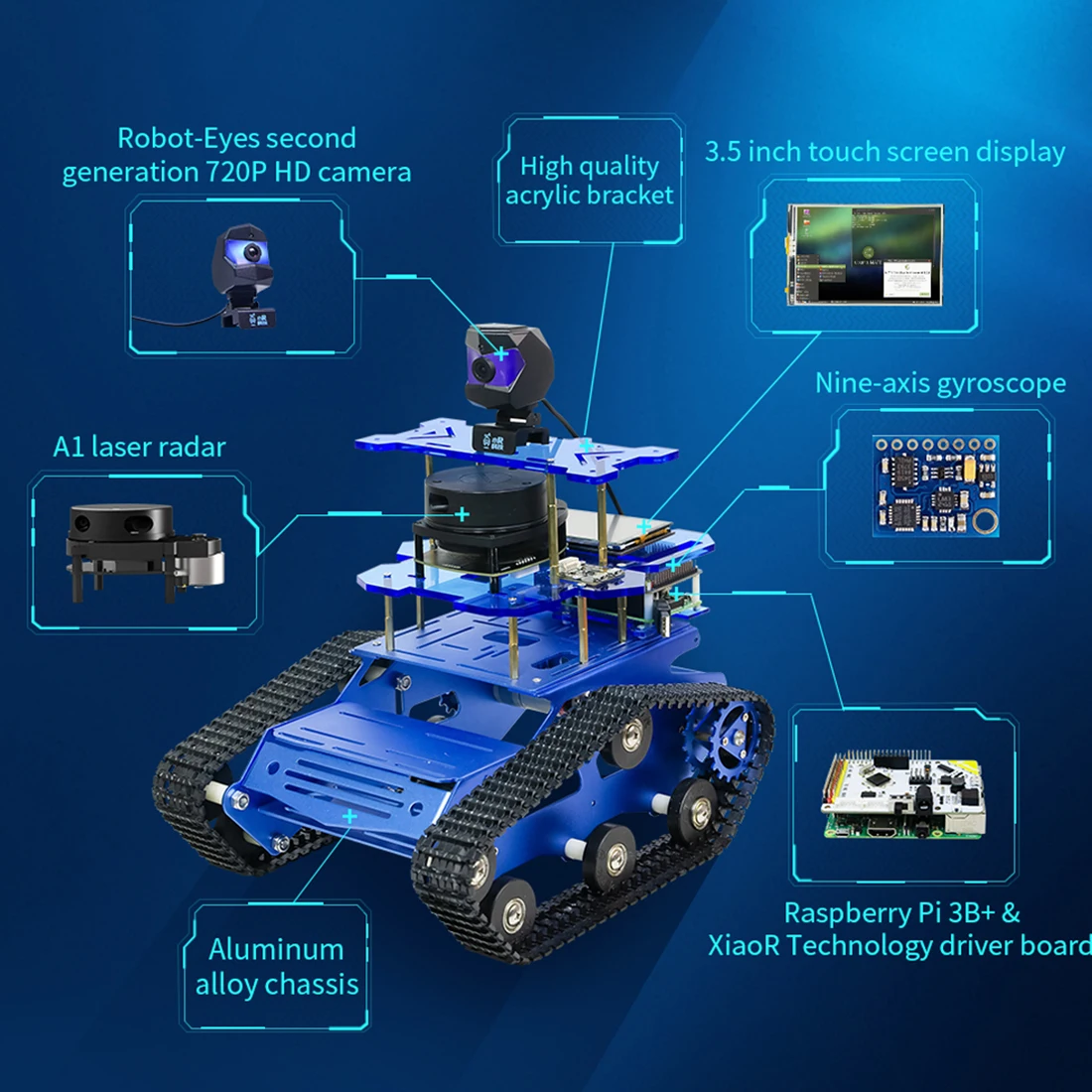
DIY умный робот танк шасси автомобиля с лазерным радаром для Raspberry Pi 4 (2G) -черный |
История изменения цены
*Текущая стоимость 37 009,18 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Aug-15-2025 | 47001.24 руб. | 47941.90 руб. | 47471 руб. |
| Jul-15-2025 | 38119.92 руб. | 38881.4 руб. | 38500 руб. |
| Jun-15-2025 | 46261.89 руб. | 47186.29 руб. | 46723.5 руб. |
| May-15-2025 | 45891.63 руб. | 46809.5 руб. | 46350 руб. |
| Apr-15-2025 | 36639.3 руб. | 37372.53 руб. | 37005.5 руб. |
| Mar-15-2025 | 45151.54 руб. | 46054.20 руб. | 45602.5 руб. |
| Feb-15-2025 | 44781.87 руб. | 45677.69 руб. | 45229 руб. |
| Jan-15-2025 | 44411.20 руб. | 45299.28 руб. | 44855 руб. |
Описание товара








 {"Version":"2.0.0","moduleList":[{"type":"html","html":{"content":"\ N\ N\ N\ N\ N\ N\ N\ N\ N\ NDIY умный робот танк шасси автомобиля с лазерным радаром для Raspberry Pi 4 (2G) -Черный <\/strong> \ n <\/div> \ n <\/div> \ n <\/div> \ n\ N\ N
{"Version":"2.0.0","moduleList":[{"type":"html","html":{"content":"\ N\ N\ N\ N\ N\ N\ N\ N\ N\ NDIY умный робот танк шасси автомобиля с лазерным радаром для Raspberry Pi 4 (2G) -Черный <\/strong> \ n <\/div> \ n <\/div> \ n <\/div> \ n\ N\ N
Характеристики:<\/strong>
. Алгоритм Slam Лазерная Строительная карта: внутренний интегрированный алгоритм gampping, hector и harto
. Внутренняя автономная навигация, динамическое препятствие: в соответствии с картами внутри помещений и планированием пути, вторичное планирование будет осуществляться, когда дороги не доступны, и может быть реализовано динамическое Предотвращение препятствий. Крытый многоточечный positoning functon, автономное планирование пути, избегая препятствий, прибытие в пункт назначения в последовательности
. Лазерная линия слежения за камерой Objuect: Лазерный Радар следит за движением мастеров. Используйте камеры и OpenCV для патрулирования линии
. Мобильное приложение управления s Robot: обеспечивает программное обеспечение управления Android APP, полный WIFI видео мониторинг и контроль функций, полное приложение карты строительства и автономной навигации функций. Мобильное приложение контролирует движения, настройки положения автомобиля, настройки навигационной цели и пути
. Сенсорный дисплей в режиме реального времени: когда вы используете robot ROS, вам нужно подключить основную панель управления к Wifi. Вам необходимо вовремя узнать ip-адрес основной платы управления, следить за работой основной платы в реальном времени и т. д. вам нужен сенсорный дисплей
. Применение алгоритма Slam: алгоритм SLAM, изученный лазерным радаром ROS, умный робот-автомобиль может быть применен в таких областях, как беспилотные автоматические роботы доставки и домашние Подметальные Роботы
. Предоставление комплексных видеообучающих материалов, развитие вторичного источника
Характеристики:<\/strong>
. Цвет: черный
. Материал: <\/span> \ nAluminium сплав + электронные компоненты <\/span> \ n
Материнская плата: Raspberry 4
. Язык программирования: Python, C
. Аккумулятор: 2200 мАч литиевая батарея
. Напряжение цифрового дисплея: трехзначное напряжение дисплея
. Мотор: двигатель щетки постоянного тока
. IMU: Гироскоп 9 осей
. Размер изделия: 28x24,2x30 см
. Вес изделия: 2800 г
. Размеры посылка: 30x15x15 см
. Вес посылка: 3000 г
. Упаковка: графическая коробка
<\/Span> \ n
Упаковочный лист <\/strong> \ n
. 1 комплект шасси
. 1x720P камера
. 1 Радар
. 1 x Raspberry PI 4
. 1 х плата питания
. 1 x экран дисплея
. 1 акриловая доска A
. 1 акриловая доска B
. 1 акриловая доска C
. 8 x медная колонна с одной головкой
. 4 x двухголовая медная колонна
. 4 x нейлоновая колонна
. 15 x винт M3
. 15 x гайка M3
. 1 х крюк и петля
. 8 x винт M2.5
. 4 x гайка M2.5
. 1x9 осевой гироскоп
. 1 х батарея <\/p> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n
<\/P> \ n
 <\/P> \ n <\/div> \ n <\/div> \ n
<\/P> \ n <\/div> \ n <\/div> \ n
\ N <\/div> \ n <\/div> \ n\ N\ N\ N\ N\ N\ N\ NDIY умный робот шасси автомобиля с лазерным радаром для Raspberry Pi 4 (2G) -Черный <\/strong> \ n <\/div> \ n <\/div> \ n <\/div> \ n\ N\ N
Характеристики:<\/strong>
. Алгоритм Slam Лазерная Строительная карта: внутренний интегрированный алгоритм gampping, hector и harto
. Внутренняя автономная навигация, динамическое препятствие: в соответствии с картами внутри помещений и планированием пути, вторичное планирование будет осуществляться, когда дороги не доступны, и может быть реализовано динамическое Предотвращение препятствий. Крытый многоточечный positoning functon, автономное планирование пути, избегая препятствий, прибытие в пункт назначения в последовательности
. Лазерная линия слежения за камерой Objuect: Лазерный Радар следит за движением мастеров. Используйте камеры и OpenCV для патрулирования линии
. Мобильное приложение управления s Robot: обеспечивает программное обеспечение управления Android APP, полный WIFI видео мониторинг и контроль функций, полное приложение карты строительства и автономной навигации функций. Мобильное приложение контролирует движения, настройки положения автомобиля, настройки навигационной цели и пути
. Сенсорный дисплей в режиме реального времени: когда вы используете robot ROS, вам нужно подключить основную панель управления к Wifi. Вам необходимо вовремя узнать ip-адрес основной платы управления, следить за работой основной платы в реальном времени и т. д. вам нужен сенсорный дисплей
. Применение алгоритма Slam: алгоритм SLAM, изученный лазерным радаром ROS, умный робот-автомобиль может быть применен в таких областях, как беспилотные автоматические роботы доставки и домашние Подметальные Роботы
. Предоставление комплексных видеообучающих материалов, развитие вторичного источника
Характеристики:<\/strong>
. Цвет: черный
. Материал: <\/span> \ nAluminium сплав + электронные компоненты <\/span> \ n
Материнская плата: Raspberry 4
. Язык программирования: Python, C
. Аккумулятор: 2200 мАч литиевая батарея
. Напряжение цифрового дисплея: трехзначное напряжение дисплея
. Мотор: двигатель щетки постоянного тока
. IMU: Гироскоп 9 осей
. Размер изделия: 28x24,2x30 см
. Вес изделия: 2800 г
. Размеры посылка: 30x15x15 см
. Вес посылка: 3000 г
. Упаковка: графическая коробка
<\/Span> \ n
Упаковочный лист <\/strong> \ n
. 1 комплект шасси
. 1x720P камера
. 1 Радар
. 1 x Raspberry PI 4
. 1 х плата питания
. 1 x экран дисплея
. 1 акриловая доска A
. 1 акриловая доска B
. 1 акриловая доска C
. 8 x медная колонна с одной головкой
. 4 x двухголовая медная колонна
. 4 x нейлоновая колонна
. 15 x винт M3
. 15 x гайка M3
. 1 х крюк и петля
. 8 x винт M2.5
. 4 x гайка M2.5
. 1x9 осевой гироскоп
. 1 х батарея <\/p> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n <\/div> \ n
Характеристики:<\/strong>
. Алгоритм Slam Лазерная Строительная карта: внутренний интегрированный алгоритм gampping, hector и harto
. Внутренняя автономная навигация, динамическое препятствие: в соответствии с картами внутри помещений и планированием пути, вторичное планирование будет осуществляться, когда дороги не доступны, и может быть реализовано динамическое Предотвращение препятствий. Крытый многоточечный positoning functon, автономное планирование пути, избегая препятствий, прибытие в пункт назначения в последовательности
. Лазерная линия слежения за камерой Objuect: Лазерный Радар следит за движением мастеров. Используйте камеры и OpenCV для патрулирования линии
. Мобильное приложение управления s Robot: обеспечивает программное обеспечение управления Android APP, полный WIFI видео мониторинг и контроль функций, полное приложение карты строительства и автономной навигации функций. Мобильное приложение контролирует движения, настройки положения автомобиля, настройки навигационной цели и пути
. Сенсорный дисплей в режиме реального времени: когда вы используете robot ROS, вам нужно подключить основную панель управления к Wifi. Вам необходимо вовремя узнать ip-адрес основной платы управления, следить за работой основной платы в реальном времени и т. д. вам нужен сенсорный дисплей
. Применение алгоритма Slam: алгоритм SLAM, изученный лазерным радаром ROS, умный робот-автомобиль может быть применен в таких областях, как беспилотные автоматические роботы доставки и домашние Подметальные Роботы
. Предоставление комплексных видеообучающих материалов, развитие вторичного источника
Характеристики:<\/strong>
. Цвет: черный
. Материал: <\/span> \ nAluminium сплав + электронные компоненты <\/span> \ n
Материнская плата: Raspberry 4
. Язык программирования: Python, C
. Аккумулятор: 2200 мАч литиевая батарея
. Напряжение цифрового дисплея: трехзначное напряжение дисплея
. Мотор: двигатель щетки постоянного тока
. IMU: Гироскоп 9 осей
. Размер изделия: 28x24,2x30 см
. Вес изделия: 2800 г
. Размеры посылка: 30x15x15 см
. Вес посылка: 3000 г
. Упаковка: графическая коробка
<\/Span> \ n
Упаковочный лист <\/strong> \ n
. 1 комплект шасси
. 1x720P камера
. 1 Радар
. 1 x Raspberry PI 4
. 1 х плата питания
. 1 x экран дисплея
. 1 акриловая доска A
. 1 акриловая доска B
. 1 акриловая доска C
. 8 x медная колонна с одной головкой
. 4 x двухголовая медная колонна
. 4 x нейлоновая колонна
. 15 x винт M3
. 15 x гайка M3
. 1 х крюк и петля
. 8 x винт M2.5
. 4 x гайка M2.5
. 1x9 осевой гироскоп
. 1 х батарея <\/p> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n <\/div> \ n
Характеристики:<\/strong>
. Алгоритм Slam Лазерная Строительная карта: внутренний интегрированный алгоритм gampping, hector и harto
. Внутренняя автономная навигация, динамическое препятствие: в соответствии с картами внутри помещений и планированием пути, вторичное планирование будет осуществляться, когда дороги не доступны, и может быть реализовано динамическое Предотвращение препятствий. Крытый многоточечный positoning functon, автономное планирование пути, избегая препятствий, прибытие в пункт назначения в последовательности
. Лазерная линия слежения за камерой Objuect: Лазерный Радар следит за движением мастеров. Используйте камеры и OpenCV для патрулирования линии
. Мобильное приложение управления s Robot: обеспечивает программное обеспечение управления Android APP, полный WIFI видео мониторинг и контроль функций, полное приложение карты строительства и автономной навигации функций. Мобильное приложение контролирует движения, настройки положения автомобиля, настройки навигационной цели и пути
. Сенсорный дисплей в режиме реального времени: когда вы используете robot ROS, вам нужно подключить основную панель управления к Wifi. Вам необходимо вовремя узнать ip-адрес основной платы управления, следить за работой основной платы в реальном времени и т. д. вам нужен сенсорный дисплей
. Применение алгоритма Slam: алгоритм SLAM, изученный лазерным радаром ROS, умный робот-автомобиль может быть применен в таких областях, как беспилотные автоматические роботы доставки и домашние Подметальные Роботы
. Предоставление комплексных видеообучающих материалов, развитие вторичного источника
Характеристики:<\/strong>
. Цвет: черный
. Материал: <\/span> \ nAluminium сплав + электронные компоненты <\/span> \ n
Материнская плата: Raspberry 4
. Язык программирования: Python, C
. Аккумулятор: 2200 мАч литиевая батарея
. Напряжение цифрового дисплея: трехзначное напряжение дисплея
. Мотор: двигатель щетки постоянного тока
. IMU: Гироскоп 9 осей
. Продукт Размеры: 28x24,2x30 см
. Вес изделия: 2800 г
. Размеры посылка: 30x15x15 см
. Вес посылка: 3000 г
. Упаковка: графическая коробка
<\/Span> \ n
Упаковочный лист <\/strong> \ n
. 1 комплект шасси
. 1x720P камера
. 1 Радар
. 1 x Raspberry PI 4
. 1 х плата питания
. 1 x экран дисплея
. 1 акриловая доска A
. 1 акриловая доска B
. 1 акриловая доска C
. 8 x медная колонна с одной головкой
. 4 x двухголовая медная колонна
. 4 x нейлоновая колонна
. 15 x винт M3
. 15 x гайка M3
. 1 х крюк и петля
. 8 x винт M2.5
. 4 x гайка M2.5
. 1x9 осевой гироскоп
. 1 х батарея <\/p> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
<\/P> \ n
\ N <\/div> \ n\ N\ N
\ N <\/div> \ n
"}]}
Смотрите так же другие товары: